")
Kickoff Lecture and Ideation Session: January 27, 11:30a at SCET Berkeley
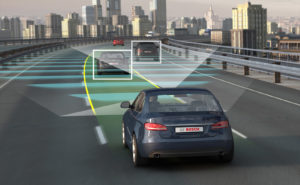
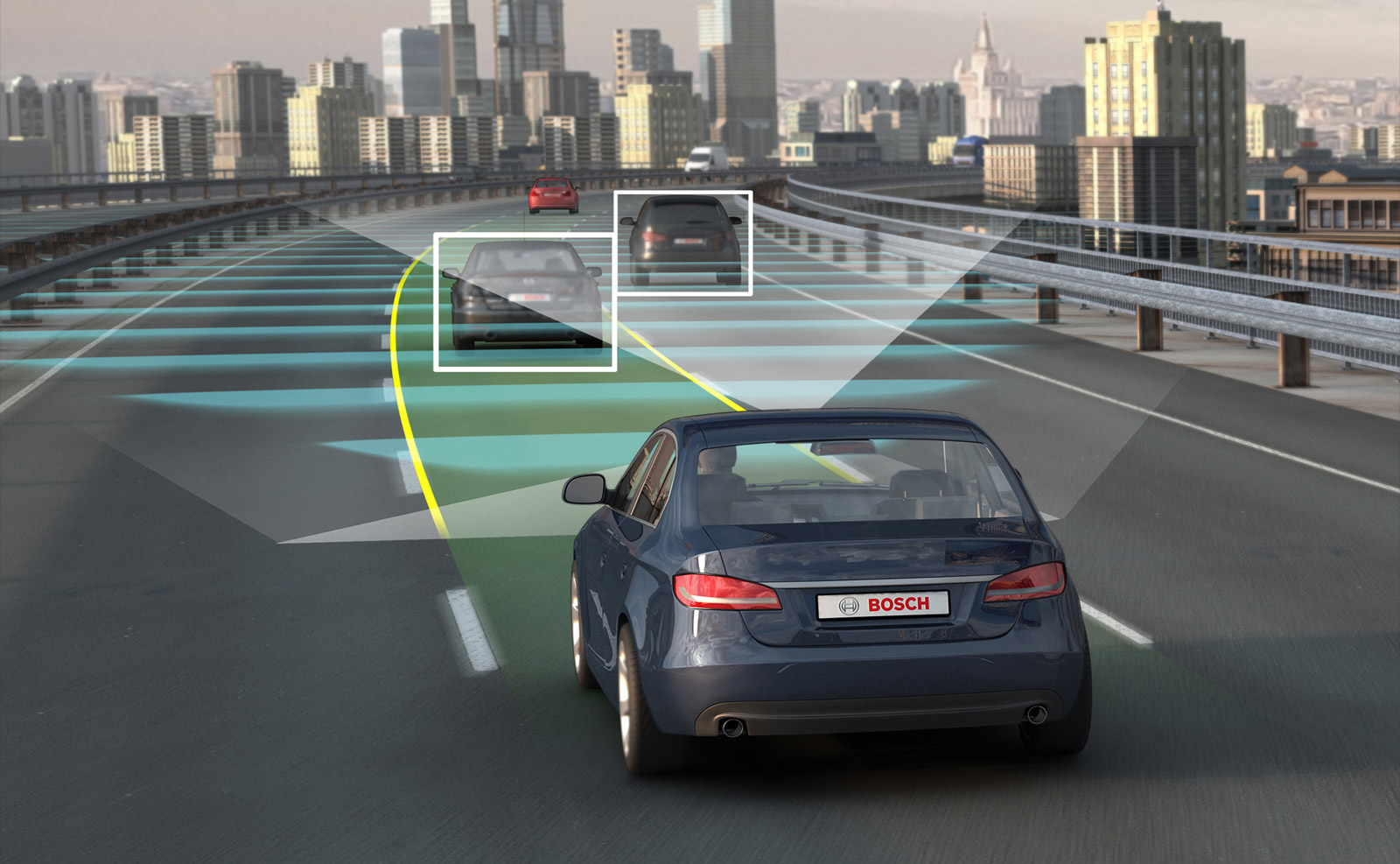
Whether a car is human operated or autonomous, sensing the environment from a car’s vantage point faces limitations because of occlusion by structures and other vehicles. With self-driving cars looming on the horizon, is it possible to use a network of sensors and cameras to augment the navigation of cars? Could we expedite the adoption of autonomous vehicles?
The Challenge
Cities have the opportunity to include sensors and cameras in areas with limited visibility to provide additional information to the vehicles in the vicinity and reduce the chances of a collision. This network can help current human drivers, and possibly solve an important barrier for commercial application of self-driving cars: reliable sensing of the environment.
Outcomes
The goal of this Collider Project is to develop a proof-of-concept prototype and a business model, in order to explore the viability of a network of city cameras/sensors. Such a network would augment autonomous car navigation from reducing accidents in blind intersections to optimizing traffic flow and parking. An important innovation in this project is the creation of a self-sustaining business model that could monetize the sensors early on and not rely on massive initial capital or city budgets to deploy. This could also help speed up the adoption of autonomous vehicles in cities.
This project is a great opportunity to learn about autonomous vehicles and the latest innovations in transportation. This will position you to get involved in a rapidly growing industry or create your own startup.
Sponsors

This Collider Project is generously sponsored by BOSCH.
$5K in prizes for the winning teams.
Advised by Mar Hershenson of Pear
Mar Hershenson of Pear. Pear.vc is a leading early stage venture capital firm.
Who should join?
Graduate and undergraduate students in Traffic Engineering, IEOR, Data Science, Computer Science, Urban Planning/Smart Cities, Business and Public Policy are encouraged to apply. Also anyone with a demonstrated interest or experience in autonomous vehicle technologies.
Please send your resume/cv with a statement of interest to scet.collider@berkeley.edu. Write – Designing Cities for Autonomous Cars – in the subject line.
Deadline to Apply: January 23.
To participate you must attend the kickoff session January 27, 11:30a at SCET Berkeley.
Course Credit Information
Students can take the Collider for 2 units of credit
INDENG 190C Special Topics: Innovation Collider